






기술과 솔루션




기계연, 뱀 비늘처럼 부드럽게 휘고, 늘어나는 배터리 개발
- 기계연 나노역학장비연구실 신축성 뱀 비늘형 배터리 개발
- ‘소프트 로보틱스 저널’ 온라인 게재
과학기술정보통신부 산하 한국기계연구원(원장 박상진, 이하 기계연)이 뱀처럼 부드럽게 휘어지면서 늘어나는 유연 신축 배터리를 개발했다. 소프트 로봇부터 웨어러블기기까지 다양한 형태의 기기에 적용해 에너지 저장 소자나 재난 환경 등 다양한 목적으로 활용될 것으로 기대된다.
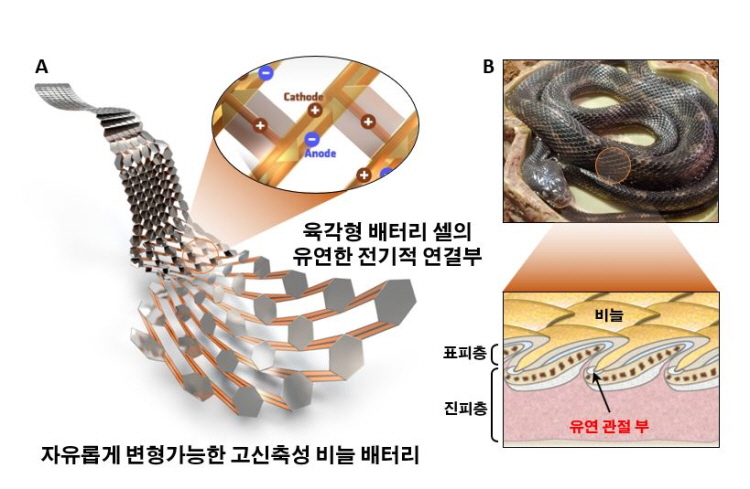
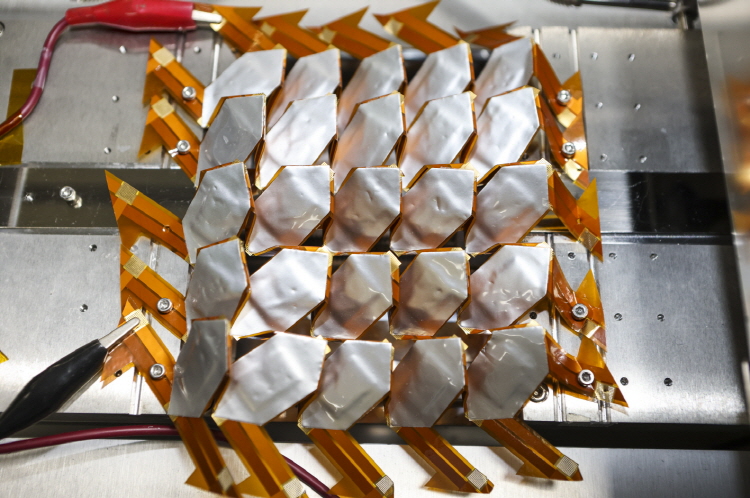
이미지 1 뱀의 비늘을 모사한 신축성 뱀 비늘형 배터리 구조
한국기계연구원 나노역학장비연구실 장봉균/현승민 박사 연구팀은 뱀의 비늘 구조에서 비늘과 유연한 관절부를 모사해 높은 안전성과 신축성을 갖는 뱀 비늘형 배터리를 개발했다. 배터리를 확대해보면, 육각형 모양의 배터리와 유연한 전기적 연결부로 이루어져 있다. 유연 연결부가 접혔다 폈다 하면서 신축성을 갖는 구조를 확인할 수 있다.
기계연 나노역학장비연구실 장봉균 선임연구원, 현승민 책임연구원 연구팀은 뱀의 비늘 구조에 착안해 안전성과 유연성을 갖는 신축성 배터리 구조를 개발하고 연구성과를 소프트 로봇 분야의 권위 있는 저널 ‘소프트 로보틱스’ 온라인에 8월 16일 발표했다.
* 논문 제목: Bioinspired, Shape-Morphing Scale Battery for Untethered Soft Robots
(무선 소프트 로봇에 적용하기 위한, 형상이 변화할 수 있는 자연 모사에 기반한 비늘 형태의 배터리)
소설 ‘어린왕자’에 묘사된 코끼리를 삼킨 보아뱀과 같이 뱀의 비늘은 하나하나는 단단하면서도 서로 접혀 외부 충격을 방어할 수 있을 뿐만 아니라 유연하게 움직이면서 높은 신축성을 구현하는 구조적 특성을 갖는다.
연구팀은 뱀의 비늘 구조를 모사한 기계적인 구조체를 제작하여 원하는 방향으로 쉽게 늘어나면서도 높은 안전성과 성능을 확보한 배터리를 개발했다. 제품 본체와 배터리가 단단하게 결합한 기존 웨어러블기기와 달리, 여러 개의 작고 단단한 배터리를 마치 비늘 같은 구조로 연결하여 유연하게 움직일 수 있는 것이 특징이다.
동시에 안전성을 구현하기 위해 배터리 내부 전지 소재의 변형을 최소화하는 구조를 적용하고 작은 크기의 배터리에 높은 충전 용량을 구현하기 위해 개별 배터리의 형상도 최적화했다.
이미지 2 신축성 뱀 비늘형 배터리
(왼쪽) 한국기계연구원 나노역학장비연구실 장봉균 박사가 신축성 뱀 비늘형 배터리를 제작하기 위한 전극 구조의 상태를 확인하고 있다.
(오른쪽) 온도 및 환경이 제어되는 유연/신축성 배터리 신뢰성 평가 장치를 이용하여 뱀 비늘형 배터리에 기계적 변형을 주면서 충·방전 신뢰성을 평가하는 모습을 보여주고 있다.
이번 성과의 핵심은 배터리 셀과 연결부의 형상을 설계하는 데 있다. 리튬 폴리머로 비늘 한 조각과 같은 육각형의 작은 배터리 셀을 제작하고, 이를 폴리머와 구리로 만든 연결부로 경첩처럼 접었다 폈다 하도록 연결했다. 이와 함께, 종이접기에서 착안한 제조 공정으로 유연 전극을 자르고 접는 방식으로 만들 수 있기 때문에 경제적으로 대량 생산할 수 있다는 것도 장점이다.
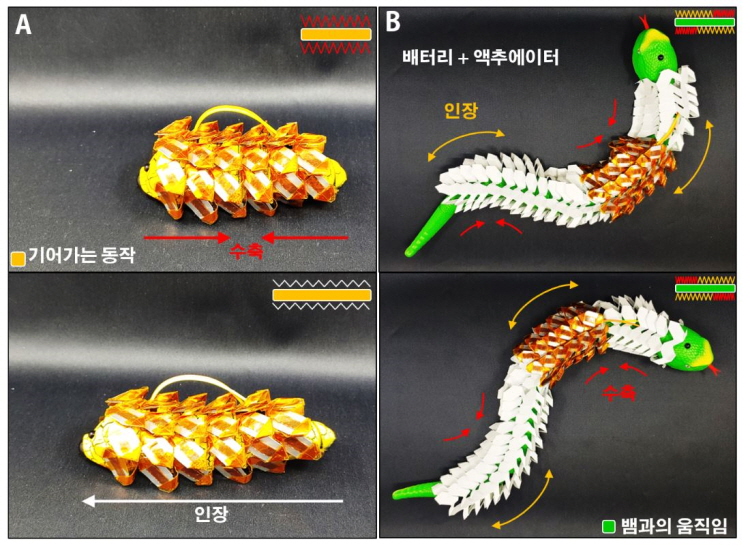
이미지 3 첨부 소프트 로봇에 적용된 신축성 뱀 비늘형 배터리
한국기계연구원 나노역학장비연구실 장봉균/현승민 박사 연구팀이 개발한 유연 신축 배터리를 뱀과 같이 유연한 관절을 갖는 소프트 로봇에 적용시켜, 유연한 움직임을 관찰하고 있다. 기어가거나 구불구불하게 이동하는 여러 형태의 로봇에 부착하여 그 움직임에 맞춰 변형하면서 동시에 무선 로봇 구동을 위한 전력을 제공할 수 있다.
이를 활용하면 부드럽고 유연한 에너지 저장 소자가 필요한 인체 착용형 소프트 로봇이나 몸이 불편한 노약자를 보조할 수 있는 재활 의료기기의 에너지 저장 소자로 활용할 수 있다. 또한, 장애물이 있는 좁은 공간도 자유롭게 이동할 수 있는 신축 및 변형 가능한 특성을 살려 재난이 발생한 공간에서 구조에 도움이 되는 재난 로봇의 전력 공급 장치로도 활용할 수 있을 것으로 기대된다.

이미지 4 웨어러블 전자기기에 적용 가능한 신축성 뱀 비늘형 배터리
한국기계연구원 나노역학장비연구실 장봉균/현승민 박사 연구팀이 개발한 신축성 뱀 비늘형 배터리를 사람의 팔과 손에 착용한 모습. 인체의 형태에 밀착시킬 수 있을 뿐만 아니라 그 움직임에 맞춰 자유롭게 변형할 수 있다.
연구팀은 향후 소프트 에너지 저장 소자의 저장 용량을 증가시킬 수 있는 기술을 개발하고, 인공 근육 및 소프트 로봇 구동 기술과의 결합을 통하여 활용도가 높은 소프트 로봇을 개발할 전망이다.
장봉균 선임연구원은 “뱀 비늘의 구조에 착안해 유연하고 신축성 있는 특성을 살리면서도 안전성을 갖춘 배터리를 개발한 것”이라며, “앞으로 국민의 건강과 안전에 도움이 될 수 있는 재활 의료 및 재난 구조에 활용될 수 있도록 후속 연구개발에 매진하겠다”고 말했다.
한편 이번 연구는 기계연 기본사업 ‘나노 기반 옴니텍스(Omni-Tex) 제조 기술 개발’과 과학기술정보통신부 지원 ‘글로벌 프론티어 파동에너지극한제어연구단’, 산업통상자원부 ‘알키미스트 사업’의 지원을 받아 수행됐다.
문의: 한국기계연구원 나노역학장비연구실 장봉균 선임연구원
042-868-7850 / 010-2646-2251 / jangbk@kimm.re.kr
한국기계연구원 기획본부 오정연 홍보팀장
042-868-7186 / 010-8464-0714 / ohsurprise@kimm.re.kr